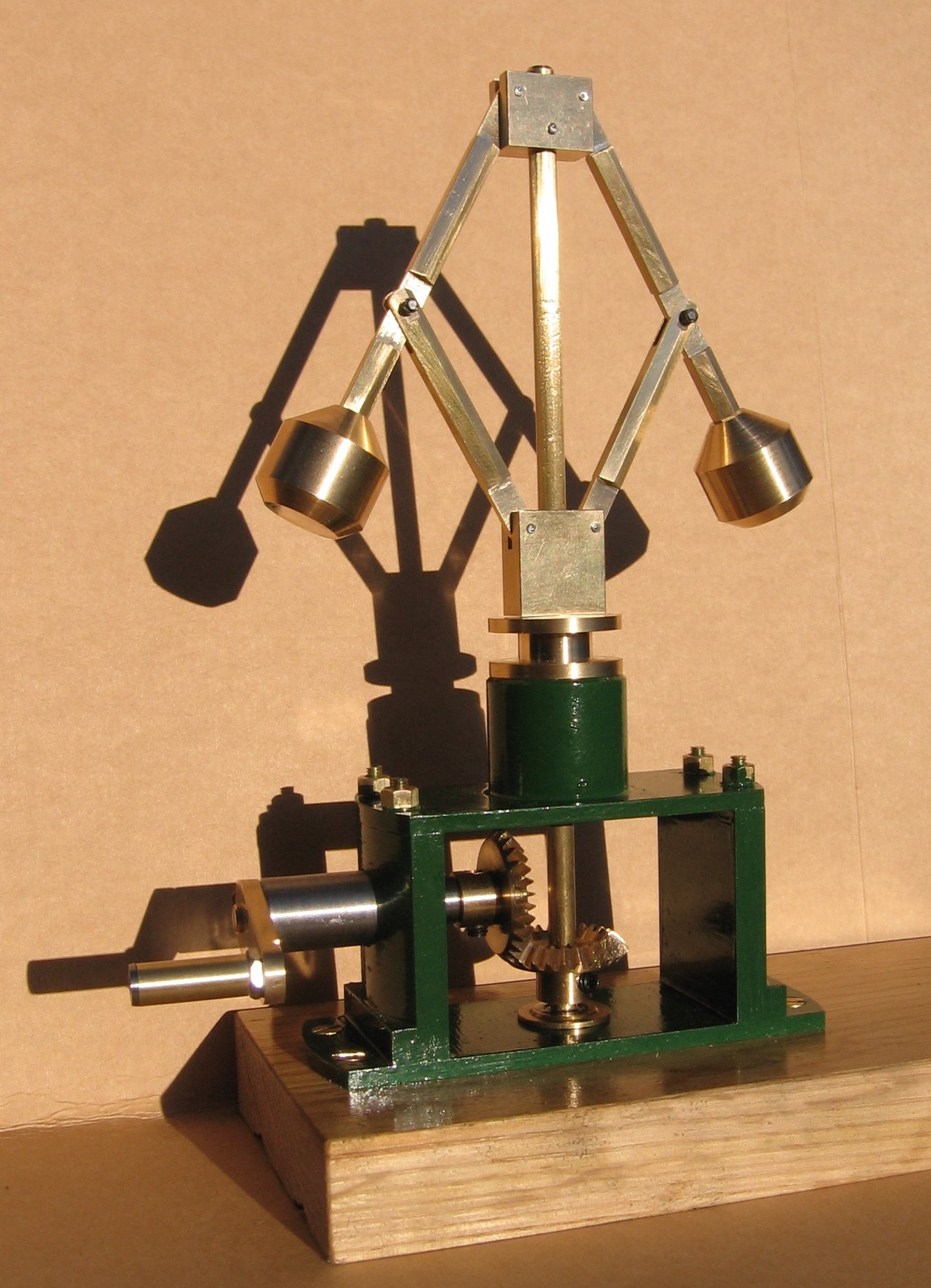
วิวัฒนาการที่ก้าวหน้าในงานอัตโนมัติเกิดขึ้นอีกขั้น จากทฤษฏีการควบคุมตอบสนองกลับโดยอุปกรณ์ลูกบอลควบคุมความเร็วของวัตต์ (Watt flyball governor) ในปี พ.ศ. 2312 ในรูปด้านล่าง
รูปลูกบอลควบคุมความเร็วของวัตต์
แนะนำเพื่อให้อ่านได้ต่อเนื่องให้ คลิกขวาเลือก Open link in new window
วิดีโอแสดงแบบจำลองของเครื่องยนต์ไอน้ำของวัตต์ที่มีอุปกรณ์ควบคุมความเร็ว
นำมาใช้ควบคุมความเร็วของเครื่องยนต์ไอน้ำ โดยการตรวจวัดความเร็วด้านขาออก และนำใช้ประโยชน์จากการเคลื่อนทีของลูกบอลในการควบคุมวาล์ว เพื่อควบคุมปริมาณของไอน้ำที่เข้าเครื่องยนต์ เมื่อความเร็วรอบของเครื่องยนต์เพิ่มขึ้น โลหะทรงกลมที่อยู่บนกัฟวาเนอร์จะยกขึ้น และมีกลไกเชื่อมต่อกับแกนเพลา วาล์วจึงปิด หรือเปิด
ลูกบอลควบคุมความเร็วของวัตต์นี้ถือได้ว่าเป็นตัวอย่างแรกของระบบควบคุมแบบป้อนกลับ (Feedback control system) ซึ่งสัญญาณป้อนส่งกลับไป และการทำงานควบคุมจะเป็นไปอย่างสมบูรณ์ในรูปแบบอุปกรณ์ทางกล
รูปตัวอย่างผังควบคุมแบบป้อนกลับ
ต่อมาในต้นปี พ.ศ. 2343 มีการประดิษฐ์อุปกรณ์ควบคุมการป้อนเข้าเครื่องของงานทอผ้า ประดิษฐ์โดย โจเซฟ จาเควซ (Joseph Jacquard) ชาวฝรั่งเศส ในปลาย พ.ศ. 2343 จึงเป็นที่รู้จักในการทำเป็นทฤษฏีการควบคุม ที่ถูกริเริ่มโดย เจ.ซี. แมกซ์เวลล์ (J.C. Maxwell) ผ่านการวิเคราะห์ของสมการเชิงอนุพันธ์ (Differential equations) ที่ใช้อธิบาย ลูกบอลตุ้มเหวี่ยงจังหวะ หรือ ฟลายบอลกัฟเวอร์เนอร์ (Flyball governor)
รูปตุ้มลูกบอลเหวี่ยง
รูปฟลายบอลกัฟเวอร์เนอร์
วิดีโอการทำงานของฟลายบอลกัฟเวอร์เนอร์
แมกซ์เวล ได้ทำการตรวจสอบผลของพารามิเตอร์ในระบบต่าง ๆ ที่ก่อให้เกิดมีประสิทธิภาพของระบบ ในเวลาเดียวกัน มีการสร้างสูตรทางคณิตศาสตร์งานควบคุมโดย วีสเนกราสกี (Vyshnegradskii)
ในช่วง พ.ศ.2373 ไมเคิลฟาราเดย์ (Michael Faraday) อธิบายกฎของการเหนี่ยวนำซึ่งเป็นพื้นฐานของมอเตอร์ไฟฟ้า และเครื่องกำเนิดไฟฟ้า ต่อมาในปลาย พ.ศ. 2423 นิโคลา เทสล่า (Nikola Tesla) ได้ประดิษฐ์มอเตอร์ไฟฟ้าเหนี่ยวนำกระแสสลับ
รูปมอเตอร์ไฟฟ้าแบบเหนี่ยวนำที่ประดิษฐ์โดยนิโคลา เทสล่า
ทำให้แนวคิดพื้นฐานการควบคุมระบบทางกลอัตโนมัติ ได้ถูกก่อตั้งขึ้นอย่างมั่นคงปลายศตวรรษที่ 18 ซึ่งเป็นการปฏิวัติของงานด้านอัตโนมัติ และผลส่งต่อไปถึงการพัฒนาอย่างรวดเร็ว ในศตวรรษที่20
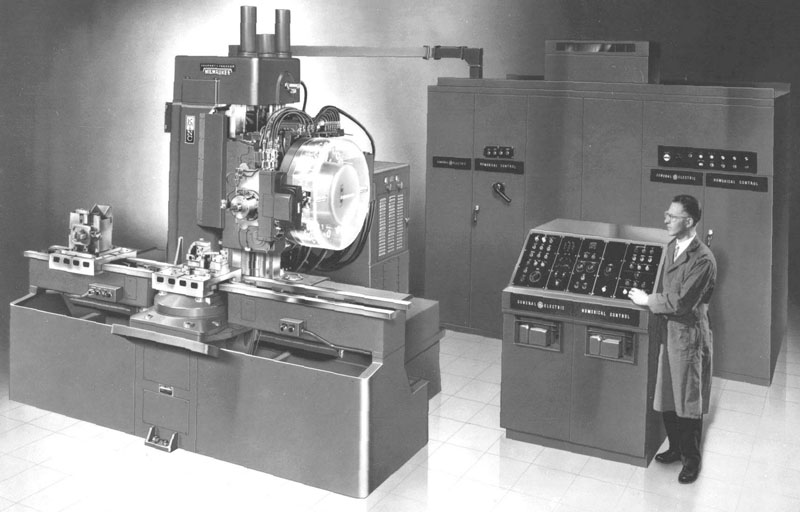
จากที่กล่าวมาข้างต้นเหล่านี้ เป็นจุดเริ่มต้นของการพัฒนาระบบอัตโนมัติแบบกลไก ที่ถูกนำมาใช้งานจนประสบความสำเร็จในทางปฏิบัติ และบางอย่างก็ยังมีการนำมาใช้งานจนถึงปัจจุบันนี้ ส่วนวิวัฒนาการในขั้นต่อไปของการควบคุมแบบอัตโนมัติ จนมีการสร้างทฤษฏีของการควบคุมอัตโนมัติ ซึ่งรู้จักการในชื่อที่เรียกว่า การควบคุมเชิงตัวเลข (Numerically Controlled: NC) ที่นิยมนำมาใช้ในเครื่องมือกลสำหรับการผลิตแบบอัตโนมัติ (มีการเริ่มพัฒนาอย่างจริงจังในปี พ.ศ. 2493 ที่ MIT)
รูปการนำการควบคุมเชิงตัวเลขมาใช้ในเครื่องมือกล
รูปอุปกรณ์นิวแมติกส์มีการนำมาใช้ในระบบควบคุม
ในปี พ.ศ. 2473 มีการพัฒนาของอุปกรณ์ระบบควบคุมโดยการใช้ นิวแมติกส์ (Pneumatic: อุปกรณ์ที่ใช้ลมอัดทำงาน) จากจุดเริ่มต้นพัฒนาจนกระทั่งไปสู่จุดที่พร้อมที่จะนำไปใช้ในกระบวนการอุตสาหกรรม อย่างไรก็ตาม จุดเริ่มต้นจริง ๆ แล้ว จะอยู่ในปี พ.ศ. 2483 ซึ่งการออกแบบของระบบควบคุมยังคงไว้ซึ่งความเป็นทั้งศาสตร์ และศิลป์ โดยการออกแบบระบบควบคุมทั่วไปมักจะได้จาก วิธีการทดลอง และความผิดพลาด (Trial-and error methods)
ใน พ.ศ. 2488 มีความก้าวหน้าอย่างต่อเนื่อง ในวิธีการทางคณิตศาสตร์ และการวิเคราะห์เพื่อให้เกิดการตกผลึกแนวคิดทางด้านวิศวกรรมควบคุม (Control engineering) การพัฒนาของระบบโทรศัพท์ และการขยายแนวความคิดในเรื่องอิเล็กทรอนิกส์เพื่อการนำไปใช้งาน มีการนำเสนอโดย โบด (Bode), ไนเควส (Nyquist) และแบล็ก (Black) ที่ห้องปฏิบัติการโทรศัพท์ของเบล
การดำเนินงานของภาคขยายย้อนกลับ (Feedback amplifiers) เป็นการพิจารณาในภาคโดเมนความถี่ (frequency domain) จากนั้นการออกแบบ กับการวิเคราะห์ก็ตามมา การปฏิบัติแบบนี้ยังจัดอยู่ในกลุ่มทั่วไป คือยังเป็น การควบคุมดั้งเดิม (Classical control) อยู่
ในช่วงเวลาเดียวกัน ทฤษฏีควบคุมก็มีการพัฒนาในรัสเซีย และฝั่งยุโรปตะวันออกด้วย จากความรู้ในด้านคณิตศาสตร์ และกลศาสตร์ประยุกต์ ได้นำไปครอบคลุมสาขาของการควบคุม และมีความสนใจจดจ่อกับการพัฒนาเพิ่มเติมจากสูตรของโดเมนเวลา (Time domain formulations) และสมการเชิงอนุพันธ์ของระบบ ที่นำมาใช้เป็นตัวแทนของระบบจากตัวแปรที่ใช้แสดงสถานะ ซึ่งเกิดขึ้นในปี พ.ศ. 2503 จนนำไปสู่การวิเคราะห์ และออกแบบ ในทางปฏิบัติ จนกลายมาเป็น การควบคุมสมัยใหม่ (Modern control) จนกระทั่งทุกวันนี้
ข้อคิดดี ๆ ที่นำมาฝาก
“โลกสว่างด้วยไฟ ส่วนใจสว่างด้วยแสงธรรม”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}