3.3 เธชเธฑเธเธเธฒเธเธเนเธฒเธเธเธฒเธญเธญเธเธเธญเธเธฃเธฐเธเธเนเธกเธเธฒเธเธฃเธญเธเธดเธเธชเน
3.3.1 เธเธฑเธงเนเธเธฅเธเธเธฒเธเธเธดเธเธดเธเธญเธฅ เนเธเนเธเนเธเธญเธเธฒเธฅเนเธญเธ
เธเธณเธชเธฑเนเธเธเธฒเธญเธญเธเธเธฒเธเนเธกเนเธเธฃเธเธญเธเนเธเธฃเธฅเนเธฅเธญเธฃเนเธเธฐเธกเธตเธเนเธฒเธเธญเธเนเธฅเธเธเธฒเธเธชเธญเธ เนเธเธฃเธนเธเนเธเธเธเธญเธเธเธดเธ (bit) (1 เธเธดเธ), เนเธเธเน (byte) (8 เธเธดเธ) เธซเธฃเธทเธญเนเธงเธดเธฃเนเธ (เธเธณ: Word) (16 เธเธดเธ) เธชเธฑเธเธเธฒเธเธเธดเธเธดเธเธญเธฅเธเธตเนเนเธเธฅเธเนเธเนเธเธญเธเธฒเธฅเนเธญเธ เนเธเนเนเธเธฅเธเธเธฒเธเธเธดเธเธดเธเธญเธฅเนเธเนเธเนเธเธญเธเธฒเธฅเนเธญเธ เธซเธฃเธทเธญเธเธตเนเธญเธเธต
เธฃเธนเธเธเธดเธ,เนเธเธเน เนเธฅเธฐเนเธงเธดเธฃเนเธ
เนเธเธฐเธเธณเนเธเธทเนเธญเนเธซเนเธญเนเธฒเธเนเธเนเธเนเธญเนเธเธทเนเธญเธเนเธซเน เธเธฅเธดเธเธเธงเธฒเนเธฅเธทเธญเธ Open link in new window
เนเธซเนเนเธฃเธฒเธเธฃเธงเธเธชเธญเธเธเธฒเธฃเนเธเธฅเธเธเนเธฒ 8 เธเธดเธเนเธเนเธเนเธเธฃเธฐเธเธฑเธเนเธฃเธเธเธฑเธเนเธเธเนเธฒเธฃเธฐเธซเธงเนเธฒเธ 0 เนเธฅเธฐ 12 เนเธงเธฅเธเน เธเธดเธเธเธตเนเธชเธณเธเธฑเธเธเธตเนเธชเธธเธเนเธเธเนเธฒเนเธฅเธเธเธฒเธเธชเธญเธเธเธตเนเธเธฐเธเธณเธเธฒเธฃเนเธเธฅเธ (เนเธฅเธเธเธฒเธเธชเธดเธ 128) เธชเธฃเนเธฒเธเธเนเธฒเธญเธเธฒเธฅเนเธญเธเนเธเนเธฒเธเธฑเธเธเธฃเธถเนเธเธซเธเธถเนเธเธเธญเธเธเนเธฒเธเธฒเธญเธญเธเธชเธนเธเธชเธธเธ เธซเธฃเธทเธญ 6 เนเธงเธฅเธเน เนเธฅเนเธงเธชเธฃเนเธฒเธเธเธฑเธงเนเธฅเธเธเนเธญเนเธเนเธเธดเนเธกเธเธถเนเธเธญเธตเธ เธซเธเธถเนเธเนเธเธชเธตเน เธซเธฃเธทเธญ 3 เนเธงเธฅเธเน เธเนเธญเนเธเธเนเนเธเธดเนเธกเธญเธตเธ 1/8 เนเธฅเธฐเนเธฃเธตเธขเธเธฅเธณเธเธฑเธเธเนเธญ เน เธเธฑเธเนเธ
เธเธฅเธฃเธงเธกเธเธญเธเธเนเธณเธซเธเธฑเธเธเนเธฒเธเธฒเธญเธญเธเธเธฑเนเธเธซเธกเธเนเธซเธฅเนเธฒเธเธตเน เนเธชเธเธเนเธซเนเนเธซเนเธเนเธเนเธเนเธฃเธเธเธฑเธเนเธเธเนเธฒเธญเธเธฒเธฅเนเธญเธเธเธตเนเธกเธตเธเธงเธฒเธกเนเธซเธกเธฒเธฐเธชเธก เธเธถเนเธเนเธเนเธเธฅเนเธฒเธงเธเธถเธเนเธเธชเนเธงเธเธเนเธญเธเธซเธเนเธฒเธเธตเน เธเนเธฒเนเธฃเธเธเธฑเธเนเธเธเนเธฒเธชเธนเธเธชเธธเธเนเธเธเนเธงเธเธเธตเนเนเธกเนเนเธเนเธซเธฒเธเนเธฒ เธเธถเนเธเนเธเนเธเธเนเธฒเธเธตเนเนเธซเธเนเธเธตเนเธชเธธเธเธเธตเนเธชเธฃเนเธฒเธเธเธถเนเธเธเธทเธญ 255/256 เธเธญเธ 12 เนเธงเธฅเธเน เธซเธฃเธทเธญ 11.953125 เนเธงเธฅเธเน
เธเธงเธฒเธกเนเธฃเธตเธขเธเนเธเธตเธขเธเธเธญเธเธชเธฑเธเธเธฒเธเธเธฐเธเธถเนเธเธญเธขเธนเนเธเธฑเธเธเธณเธเธงเธเธเธญเธเธเธดเธเธเธตเนเนเธเนเธฃเธฑเธเธเธฒเธฃเธขเธญเธกเธฃเธฑเธเนเธเธขเธเธตเนเธญเธเธต เนเธฅเธฐเธเนเธงเธเธเธญเธเธเธฒเธญเธญเธเธเธตเนเธเธณเนเธเนเธ เธฃเธนเธเธเนเธฒเธเธฅเนเธฒเธ
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธเธฑเนเธเธเธฑเธเนเธเธเธฒเธญเธญเธ เธเธตเนเธญเธเธต
เธฃเธนเธเนเธชเธเธเนเธซเนเนเธซเนเธเธเธถเธเธเธฑเธเธเธฑเธเธเนเนเธเธเธฑเนเธเธเธฑเธเนเธเธญเธขเนเธฒเธเธเนเธฒเธข เนเธเธขเธเธฒเธฃเนเธเนเธซเธเธถเนเธเนเธเธเน เนเธฅเธเนเธเธเธฒเธฃเธตเนเธเธฒเนเธเนเธฒ เนเธฅเธฐ 12 เนเธงเธฅเธเน เธญเธเธฒเธฅเนเธญเธเธเธฒเธญเธญเธ
3.3.2 เธญเธธเธเธเธฃเธเนเธเธณเธเธฒเธเธเนเธฒเธเธเธฒเธญเธญเธ
เนเธเนเธเนเธเธตเธขเธงเธเธฑเธ เธเธฑเธงเนเธเนเธเนเธเธญเธฃเนเธเธฃเธงเธเธเธฑเธ เธเธตเนเนเธเนเธเธฅเนเธฒเธงเนเธงเนเนเธเธทเนเธญเธเธเนเธเนเธเธซเธฑเธงเธเนเธญเธเธตเนเนเธฅเนเธง เนเธฅเธฐเธเธฐเนเธเนเธเธฅเนเธฒเธงเธญเธขเนเธฒเธเธฅเธฐเนเธญเธตเธขเธเนเธเธเธเธเนเธญ เน เนเธ เธญเธธเธเธเธฃเธเนเธเธณเธเธฒเธเธเธฑเนเธเธเธทเนเธเธเธฒเธเนเธเธขเธเธฑเนเธงเนเธเธเธตเนเธเธฐเธเธฅเนเธฒเธงเธเธถเธเธ เธฒเธเธฃเธงเธกเนเธเธซเธฑเธงเธเนเธญเธเธตเนเนเธเนเนเธเน เธชเธงเธดเธเธเน (Switches), เนเธเธฅเธดเธเธญเธขเธเน (Solenoids) เนเธฅเธฐเธกเธญเนเธเธญเธฃเน (Motors)
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธชเธงเธดเธเธเน
เธชเธงเธดเธเธเน เนเธเนเธเธญเธธเธเธเธฃเธเนเธเธทเนเธเธเธฒเธเธชเธธเธเนเธเธเธฒเธฃเธเธงเธเธเธธเธกเธเธฒเธฃเธเธณเธเธฒเธเธเธญเธเธญเธธเธเธเธฃเธเนเธเธณเธเธฒเธ เธเธตเนเนเธซเนเธเธเนเธฒเธข เน เธเนเธเธทเธญ เธชเธงเธดเธเธเนเนเธเธดเธ / เธเธดเธ เนเธเนเธชเธเธชเธงเนเธฒเธเนเธเธเนเธฒเธ เธชเธงเธดเธเธเนเธกเธตเธซเธฅเธฒเธขเธเธฃเธฐเนเธ เธเธเธถเนเธเธฃเธงเธกเนเธเธเธถเธเธชเธงเธดเธเธเนเนเธกเนเนเธซเธฅเนเธเนเธเธเนเธฒ เธซเธฃเธทเธญเธฃเธตเนเธฅเธขเน (Relays) เนเธฅเธฐเธญเธธเธเธเธฃเธเนเนเธเธฅเธดเธเนเธชเธเธ (Solid-state devices)
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธฃเธตเนเธฅเธขเน
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธญเธธเธเธเธฃเธเนเนเธเธฅเธดเธเธชเนเธเธ
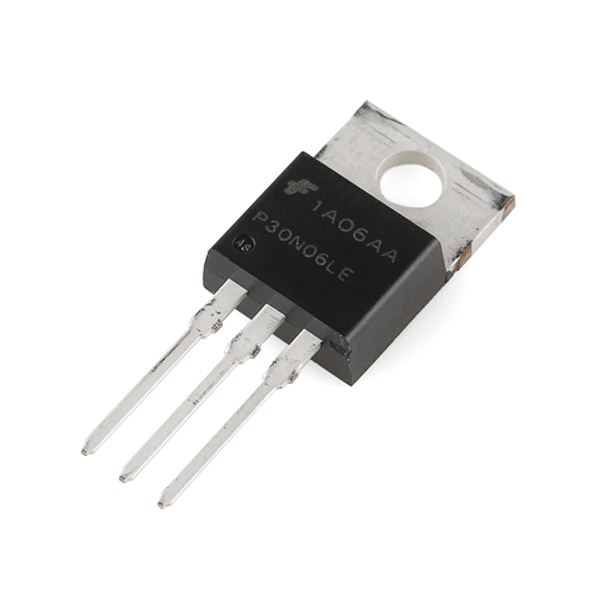
เนเธเธญเธธเธเธเธฃเธเนเนเธเธฅเธดเธเธชเนเธเธ เธเนเธเธฐเธฃเธงเธกเนเธเธเธถเธ เนเธเนเธญเธ (Diodes), เนเธเธฃเธตเธชเนเธเธญเธฃเน (Thyristors), เธเธฃเธฒเธเธเธดเธชเนเธเธญเธฃเนเธชเธญเธเธเธฑเนเธง (Bipolar transistors), เธเธฃเธฒเธเธเธดเธชเนเธเธญเธฃเนเธชเธเธฒเธกเนเธเธเนเธฒ เธซเธฃเธทเธญเนเธเธ (Field-Effect Transistors: FETs) เนเธฅเธฐเธเธฃเธฒเธเธเธดเธชเนเธเธญเธฃเนเธชเธเธฒเธกเนเธเธเนเธฒเธชเธฒเธฃเธเธถเนเธเธเธฑเธงเธเธณเนเธฅเธซเธฐเธญเธญเธเนเธเธเน เธซเธฃเธทเธญเธกเธญเธชเนเธเธ (Metal Oxide Semiconductor Field-Effect Transistor: MOSFET)
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธกเธญเธชเนเธเธ
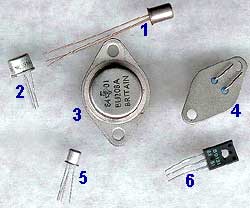
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธเธฃเธฒเธเธเธดเธชเนเธเธญเธฃเน
เธชเธงเธดเธเธเน เธชเธกเธฒเธฃเธเธเธณเธกเธฒเนเธเนเธฃเนเธงเธกเธเธฑเธเธเธฑเธเธเธฑเธงเธเธฃเธงเธเธเธฑเธเนเธเน เธเธฑเธเธเธฑเนเธเธเธฒเธฃเนเธเธดเธเธซเธฃเธทเธญเธเธฒเธฃเธเธดเธเธเธณเนเธเธชเธนเนเธเธฒเธฃเธเธงเธเธเธธเธกเธเธฒเนเธเนเธฒเธเธญเธเนเธเนเธเนเธเธญเธฃเน เธซเธฃเธทเธญเธเธธเธเธฅเธฑเธเธฉเธเธฐเนเธเธเธฒเธฐเธเธญเธเนเธเนเธเนเธเธญเธฃเน
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเนเธเธฅเธดเธเธญเธขเธเน
เนเธเธฅเธตเธเธญเธขเธเน เนเธเนเธเธญเธธเธเธเธฃเธเนเธเธตเนเธกเธตเธเธฒเธฃเนเธเธฅเธทเนเธญเธเธเธตเนเธเธญเธเนเธเธเนเธซเธฅเนเธเนเธกเธทเนเธญเนเธเธดเธเธเธฃเธฐเนเธชเนเธเธเนเธฒเนเธซเธฅเธเนเธฒเธเธเธเธฅเธงเธเธเธตเนเธเธฑเธเธญเธขเธนเนเธฃเธญเธ เน เนเธเธเนเธซเธฅเนเธ เธเธฒเธฃเนเธเธฅเธทเนเธญเธเธเธตเนเธเธญเธเนเธเธเนเธซเธฅเนเธเธเธตเน เธเธณเนเธเนเธเนเนเธเธเธฒเธฃเธเธงเธเธเธธเธกเธญเธธเธเธเธฃเธเนเธเนเธฒเธ เน เนเธเนเนเธเนเธ เธญเธธเธเธเธฃเธเนเธเธงเธเธเธธเธกเธเธฒเธฃเนเธซเธฅเธเธญเธเธฃเธฐเธเธเนเธฎเธเธฃเธญเธฅเธดเธเธชเน เธซเธฃเธทเธญเธเธดเธงเนเธกเธเธดเธเธชเน
เธฃเธนเธเธงเธฒเธฅเนเธงเธเธงเธเธเธธเธกเธเธญเธเนเธซเธฅเธเธตเนเนเธเนเธเธเธฅเธงเธเนเธเธฅเธดเธเธญเธขเธเน
เธเธฒเธฃเนเธเนเธเธฃเธฐเนเธขเธเธเนเธเธญเธเนเธเธฅเธดเธเธญเธขเธเนเธกเธตเธกเธฒเธเธกเธฒเธข เธฃเธงเธกเนเธเธเธถเธ เธฃเธฐเธเธเนเธเธฃเธ เนเธฅเธฐเธเธฒเธฃเธเธฅเธดเธเธเธฒเธเธญเธธเธเธชเธฒเธซเธเธฃเธฃเธกเธเธตเนเนเธเธตเนเธขเธงเธเธฑเธเธเธญเธเนเธซเธฅ เธซเธฃเธทเธญเธเธฅเนเธ เธชเนเธงเธเนเธเธฃเธฒเธขเธฅเธฐเนเธญเธตเธขเธเธเธตเนเธกเธฒเธเธเธงเนเธฒเธเธตเนเธเธฐเนเธเนเธเธฅเนเธฒเธงเธเธถเธเนเธเธเธเธเนเธญ เนเนเธ
เธกเธญเนเธเธญเธฃเน เธกเธตเธเธฃเธฐเนเธ เธเธซเธฅเธฑเธ เน เธญเธขเธนเนเธชเธฒเธกเธเธฃเธฐเนเธ เธ เนเธเนเนเธเน เธกเธญเนเธเธญเธฃเนเนเธเธเนเธฒเธเธฃเธฐเนเธชเธเธฃเธ เธซเธฃเธทเธญเธกเธญเนเธเธญเธฃเนเธเธตเธเธต (Direct current motors), เธกเธญเนเธเธญเธฃเนเนเธเธเนเธฒเธเธฃเธฐเนเธชเธชเธฅเธฑเธ เธซเธฃเธทเธญเธกเธญเนเธเธญเธฃเนเนเธญเธเธต (Alternating current motors) เนเธฅเธฐเธกเธญเนเธเธญเธฃเนเธชเนเธเธเนเธเธญเธฃเน (Stepper motors)
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธกเธญเนเธเธญเธฃเนเธเธตเธเธต
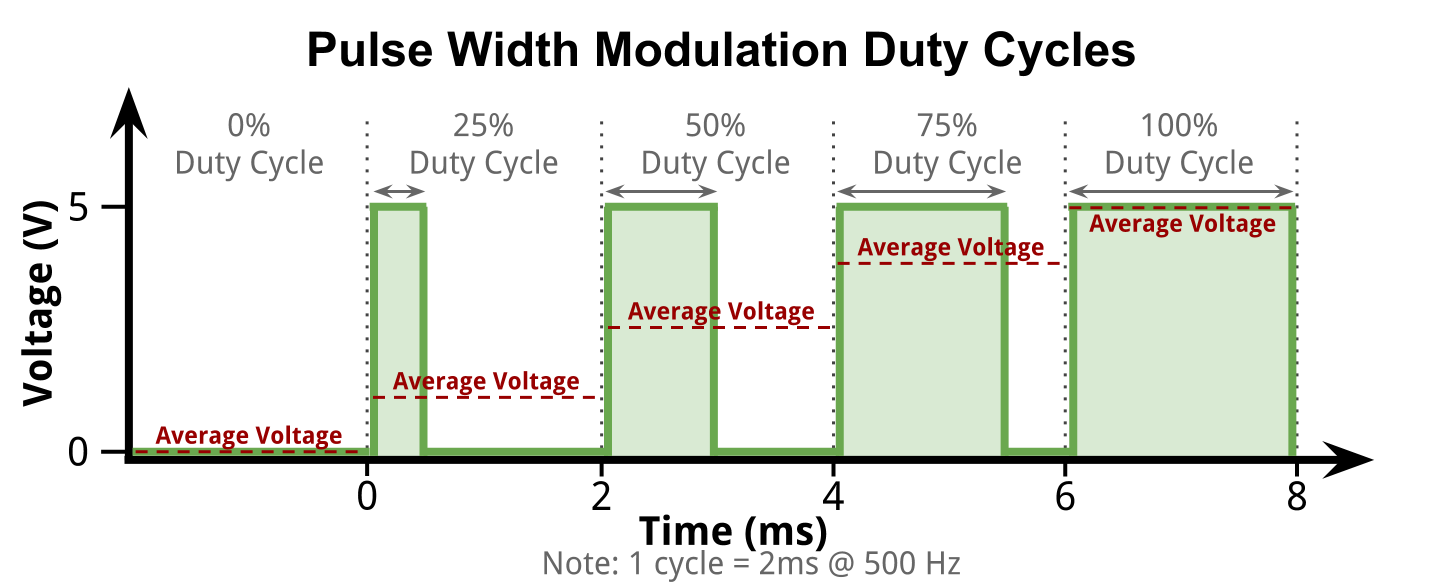
เธกเธญเนเธเธญเธฃเนเธเธตเธเธตเธญเธฒเธเธเธนเธเธเธงเธเธเธธเธกเนเธเธขเนเธฃเธเธเธฑเธเนเธเธเนเธฒเธเธฃเธฐเนเธชเธเธฃเธเธเธเธเธตเน เธซเธฃเธทเธญเนเธเธขเธเธฒเธฃเธเธฃเธฑเธเธเธงเธฒเธกเธเธงเนเธฒเธเธเธฑเธฅเธชเน เธซเธฃเธทเธญเธเธตเธเธฑเธเนเธเธดเธฅเธขเธนเนเธญเนเธก (Pulse Width Modulation: PWM) เนเธเธชเธฑเธเธเธฒเธเธเธตเธเธฑเธเนเธเธดเธฅเธขเธนเนเธญเนเธก เนเธเนเธเธเธฑเธเนเธชเธเธเนเธเธฃเธนเธเธเนเธฒเธเธฅเนเธฒเธ
เธฃเธนเธเธเธฒเธฃเธเธฃเธฑเธเธเธงเธฒเธกเธเธงเนเธฒเธเธเธฑเธฅเธชเน
เนเธฃเธเธเธฑเธเนเธเธเนเธฒเนเธเนเธเธเธฒเธฃเนเธเธดเธ เนเธฅเธฐเธเธดเธเธชเธฅเธฑเธเธเธฑเธเนเธเธเธเธฐเธเธตเนเนเธเธดเธเธเธฒเธฃเนเธเธฅเธตเนเธขเธเนเธเธฅเธ (เธเธฒเธฃเธเธฃเธฑเธ) เธเธฒเธกเธเธงเธฒเธกเธเธงเนเธฒเธเธเธญเธเธชเธฑเธเธเธฒเธเนเธเนเธงเธฅเธฒ (On-time signal) เธซเธฃเธทเธญเธงเธฑเธเธเธฑเธเธฃเธเธณเธเธฒเธ (Duty cycle)
เธกเธญเนเธเธญเธฃเนเนเธญเธเธตเนเธเธขเธเธเธเธดเธฃเธฒเธเธฒเธเธฐเธเธนเธเธเธงเนเธฒเธกเธญเนเธเธญเธฃเนเธเธตเธเธต เนเธเนเธเนเธญเธเธเธฒเธฃเธซเธกเธธเธเธเธฑเธเธเนเธงเธขเธเนเธฒเธเธงเธฒเธกเธเธตเนเธเธฑเธเนเธเธฃเนเธเธเธฒเธฃเธเธงเธเธเธธเธกเธเธงเธฒเธกเนเธฃเนเธงเธฃเธญเธเธเธฒเธฃเธซเธกเธธเธ
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธกเธญเนเธเธญเธฃเนเนเธญเธเธต
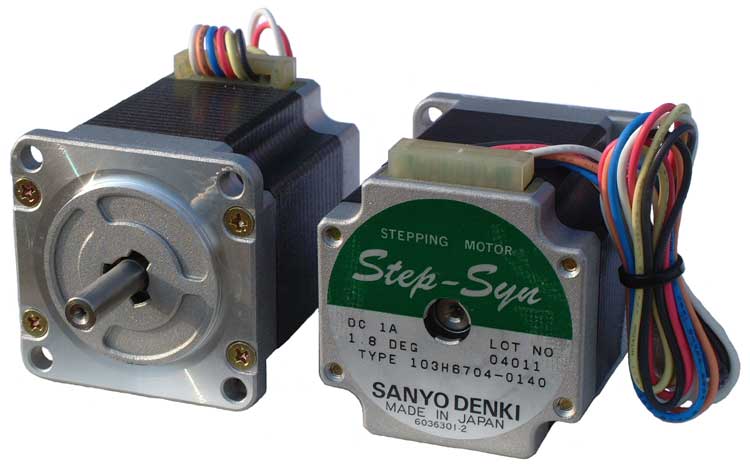
เธกเธญเนเธเธญเธฃเนเธชเนเธเธเนเธเธญเธฃเนเนเธเธฅเธทเนเธญเธเธเธตเนเนเธเธขเธเธฒเธฃเธซเธกเธธเธเธเธฒเธกเธเธณเธเธงเธเธเธญเธเธญเธเธจเธฒเนเธเธเธฒเธฃเธเธญเธเธชเธเธญเธเธเนเธญเธเธฑเธฅเธชเนเธเธฒเนเธเนเธฒ
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธกเธญเนเธเธญเธฃเนเธชเนเธเธเนเธเธญเธฃเน
เธเนเธญเธเธดเธเธเธต เน เธเธตเนเธเธณเธกเธฒเธเธฒเธ
“เธเธดเธเธซเธงเธฑเธ เนเธเนเธเนเธฃเธทเนเธญเธเธเธเธเธด
เนเธเธเธเธณเธซเธเธด เนเธเนเธเนเธฃเธทเนเธญเธเธเธฃเธฃเธกเธเธฒเธเธด
เนเธเธดเธเนเธเนเธเธเธ เนเธกเนเธเธงเธฃเธเธตเนเธเธฅเธฒเธ
เนเธเธฃเธฒเธฐเนเธฃเธทเนเธญเธเธเธดเธเธเธฅเธฒเธ
เนเธเนเธเนเธฃเธทเนเธญเธเธเธฃเธฃเธกเธเธฒ”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}